- prediction/image/ FastAPI 서버 Docker 환경 구성 - Dockerfile: PyTorch 2.1 + CUDA 12.1 기반 GPU 이미지 - docker-compose.yml: GPU 할당 + 데이터 볼륨 마운트 - requirements.txt: 서버 의존성 목록 - .env.example: 환경변수 템플릿 - DOCKER_USAGE.md: 빌드/실행/API 사용법 문서 - Dockerfile에 .dockerignore 제외 폴더 mkdir -p 추가 - .gitignore: prediction/image 결과물 및 모델 가중치(.pth) 제외 추가 - dbInsert_csv.py, dbInsert_shp.py 삭제 (미사용 DB 로직) - api.py: dbInsert import 및 주석 처리된 DB 호출 코드 제거 - aerialRouter.ts: req.params 타입 오류 수정 |
||
|---|---|---|
| .. | ||
| erfnet_fcn_4x4_512x1024_160k_cityscapes.py | ||
| erfnet.yml | ||
| README.md | ||
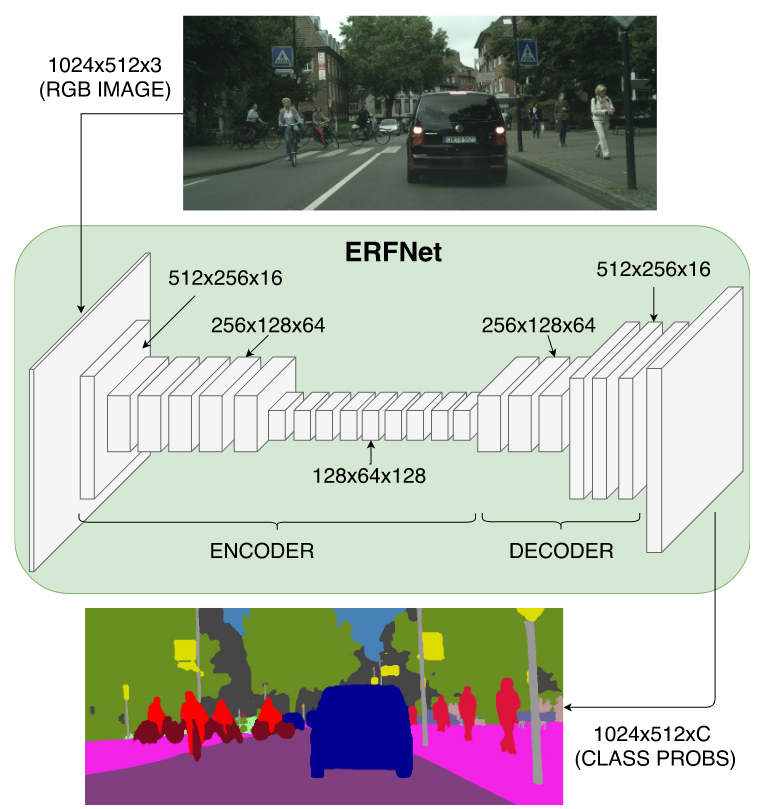
ERFNet
ERFNet: Efficient Residual Factorized ConvNet for Real-time Semantic Segmentation
Introduction
Abstract
Semantic segmentation is a challenging task that addresses most of the perception needs of intelligent vehicles (IVs) in an unified way. Deep neural networks excel at this task, as they can be trained end-to-end to accurately classify multiple object categories in an image at pixel level. However, a good tradeoff between high quality and computational resources is yet not present in the state-of-the-art semantic segmentation approaches, limiting their application in real vehicles. In this paper, we propose a deep architecture that is able to run in real time while providing accurate semantic segmentation. The core of our architecture is a novel layer that uses residual connections and factorized convolutions in order to remain efficient while retaining remarkable accuracy. Our approach is able to run at over 83 FPS in a single Titan X, and 7 FPS in a Jetson TX1 (embedded device). A comprehensive set of experiments on the publicly available Cityscapes data set demonstrates that our system achieves an accuracy that is similar to the state of the art, while being orders of magnitude faster to compute than other architectures that achieve top precision. The resulting tradeoff makes our model an ideal approach for scene understanding in IV applications. The code is publicly available at: https://github.com/Eromera/erfnet.
Citation
@article{romera2017erfnet,
title={Erfnet: Efficient residual factorized convnet for real-time semantic segmentation},
author={Romera, Eduardo and Alvarez, Jos{\'e} M and Bergasa, Luis M and Arroyo, Roberto},
journal={IEEE Transactions on Intelligent Transportation Systems},
volume={19},
number={1},
pages={263--272},
year={2017},
publisher={IEEE}
}
Results and models
Cityscapes
| Method | Backbone | Crop Size | Lr schd | Mem (GB) | Inf time (fps) | mIoU | mIoU(ms+flip) | config | download |
|---|---|---|---|---|---|---|---|---|---|
| ERFNet | ERFNet | 512x1024 | 160000 | 6.04 | 15.26 | 71.08 | 72.6 | config | model | log |
Note:
-
The model is trained from scratch.
-
Last deconvolution layer in the original paper is replaced by a naive
FCNHeaddecoder head and a bilinear upsampling layer, found more effective and efficient.